探索未来科技:可穿戴式多模态人机接口改变机械臂控制方式
2024年3月27日
琶洲实验室
698
你是否曾想过只需简单的动作或者声音指令就能控制机械臂完成任务?琶洲实验室和华南理工大学的科研人员们研发的可穿戴式多模态人机接口正在实现这一梦想,它将科技融入我们的日常生活,改变了我们与机器之间的互动方式。
01连接你与机器的桥梁
传统的机械臂控制方式通常依赖于手动操作,用户需要使用手柄、键盘或者鼠标等外部设备来控制机械臂的运动。然而,这种方式存在着一定的局限性,比如操作复杂、不够直观、需要专业培训等问题。可穿戴式多模态人机接口技术的出现改变了这一现状。

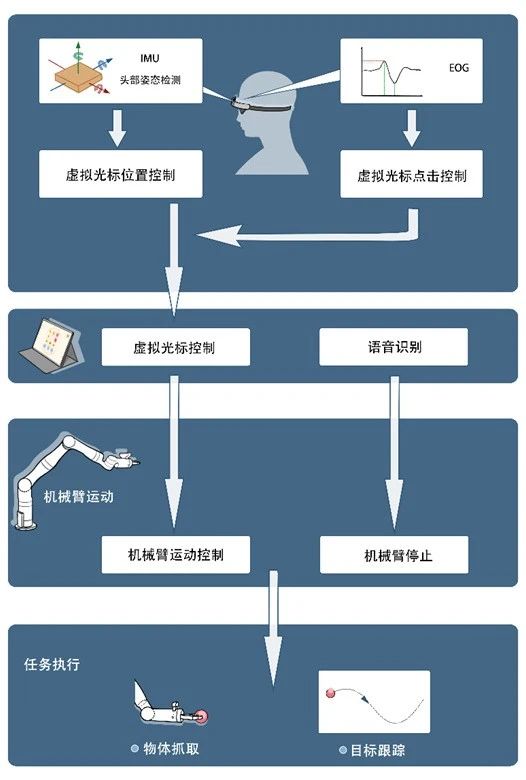
可穿戴式多模态人机接口是一种创新的科技装置,集合了多种信号模态,能够捕捉到我们的注意力、头部姿态,通过集成传感器、语音识别、姿势识别等多种交互方式,用户可以通过简单的动作、语音指令等方式来操控机械臂,实现更加自然、高效的操作。
02实验任务验证系统性能
为了验证可穿戴式多模态人机接口系统的性能,研究人员进行了一系列实验任务,包括目标跟踪、抓取物体以及书写字母等。



这些实验不仅展示了系统的可靠性和准确性,更为重要的是,它们证明了这项技术的实用性和可行性。未来,这一系统有望在医疗、工业、甚至日常生活中发挥重要作用,为人们带来更多的便利和乐趣。
03科技的无限可能性
可穿戴式多模态人机接口的出现,只是科技进步的一个缩影。随着科学技术的不断发展,我们可以预见,未来的世界将会更加智能化、便捷化。这项技术的应用前景广阔,它将为人类带来更多意想不到的惊喜与改变。让我们怀着憧憬和期待,共同探索科技的未来,开启更加美好的生活。
资料参考
[1]陆子霖,周亚军,黄骐云等.基于可穿戴式多模态人机接口的机械臂运动控制方法[J].机器人,2024,46(01):68-80.DOI:10.13973/.j.cnki.robot.230254.
作者介绍